 |








|
会員専用ページ
商品検索
商品カテゴリ
|
OXY3を組み立てよう
|





|
フライトスタイル |
ヘッドスピード |
最大ピッチ |
|
ホバリング |
2500〜3000 |
+10/-3 |
|
2Dフライト |
3000〜3500 |
+10/-5 |
|
ソフト3D |
3000〜3500 |
+/- 12 |
|
ハード3D |
3500〜4000 |
+/- 14 |
|
エクストリーム3D |
4000〜4500 |
+/- 14 |
※これはOXY3の設定範囲です。機体により耐えられるヘッドスピードがちがいます。
設定範囲を守らないと機体の破損や事故の原因になりますので、無理なヘッドスピードを
設定しないでください。
では、ヘッドスピードの計算方法どうするのでしょうか?
参考までにヘッドスピードの計算を紹介します。![]()
ヘッドスピードの計算
ヘッドスピード = バッテリ電圧 × モータKV値 × ピニオンギア数 ÷ メインギア数
バッテリ電圧XモータKV値はモータの回転数を表します。
(※KV値は1V、負荷無しでの回転数)
モータの回転数で管理する場合は
モータの回転数 = (メインギア数÷ピニオンギア数) X ヘッドスピードを参考にしてください。
3セル仕様のOXY3を作る
式を使って推奨品で構成する場合のヘッドスピードを計算してみましょう。
3セルリポのバッテリ電圧 = 3.7(V)×3(セル) =11.1
モータのKV値は4100KV(型番:LX−LX8005)
EOX
モータ 2214-4100kv - V2
ピニオンギアは11T or 14T (キットに付属)
メインギアは140Tになります。
※OXY3のキットには11T、14T が付属します。
2種類のピニオンを使用して計算してみましょう。
11Tを使うと
ヘッドスピード = 11.1×4100×11÷140 = 3575.79
となり、通常フライト〜ハード3Dフライト向けになります。
14Tを使うと
ヘッドスピード = 11.1×4100×14÷140 = 4551
となり、エクストリーム3Dフライト向けになります。
(※計算では4500を超えていますので、4500を超えないよう出力を調整する必要があります)
そのほか、ご自信のフライトスタイルに合わせる場合は別売のピニオンギアを使用します。
(ピニオンギアは10T〜15Tが用意されています。)
モータのKV値によりヘッドスピードが変わります。ピニオンギアも合わせて変更し自分の目標となる
ヘッドスピードに調整してください。
6セル仕様のOXY3を作る
式を使って6セルの場合のヘッドスピードを計算してみましょう。
6セルリポのバッテリ電圧 = 3.7(V)×6(セル) =22.2
モータのKV値は2500KV(型番:LX−LX8006)
EOX
モータ 2214-6S-2500kv
ピニオンギアは11T or 14T (キットに付属)
メインギアは140T
11Tを使うと
ヘッドスピード = 22.2×2500×11÷140 = 4360.71
となり、ハード3D〜エクストリーム3Dフライト向けになります。
14Tを使うと
ヘッドスピード = 22.2×2500×14÷140 = 5550
となり、4500を超えていますので注意が必要です。
※計算結果から見るとこの組み合わせで14Tの使用はお勧めできません。![]()
モータのKV値は電圧(セル数)を上げる時は小さく、電圧(セル数)を下げる時は大きくします。
回転数の微調整はピニオンギアを変えて調整します。
※モータの対応セル数を確認する必要があります。
OXY3の例では3セルバージョンと6セルバージョンでしたが
モータとピニオンギアの組み合わせしだいで4セル、5セルも可能です。
2-2-2今回搭載するモータは?
今回はESC(アラインのREX-BL35X)が3セル〜4セル対応ですので、使えるモータも限られます。
多少重くなりますが、450用のモータも含めてを試してみたいと思います。
多少乱暴ですが、いくつかモーターを試してみたいと思います。
推奨スペックに合うものがあればよいのですが、なかなか良いモータが見つかりません。
(目標は推奨モータ以外に手ごろなモータを探すです。)
候補1、ハイペリオン製のH2220アウターモーター
4-Turn / 3148Kv タイプです。
OXYヘリの推奨はステーター径21-08〜22-14を推奨していまが、このモータは22-20と少し大きなモータになります。
モータ径は問題なく搭載できるサイズです。長さは多少長くなくなりますが、搭載する空間を確認しましたが上には余裕がありますので搭載には問題なさそうです。
H2220アウターモーター
4-Turn / 3148Kv タイプについて
このモータは発売から何年か経過している古いモータで、細かいスペックなど、メーカからの資料はありません。
サイズは450クラスのヘリ用で使え、セル数は3セルまでの特定機種向けに作られてたモータのようです。
ですので、このモータがどの程度、性能を発揮するかは実際に試さないとわからな点があります。
それでは調査しましょう。わからないないなら試すです。
参考:ヘッドスピードは?
H2220アウターモーター
4-Turn / 3148Kv タイプのヘッドスピードを計算、
3Sバッテリーで11Tを使うと
ヘッドスピード = 11.1×3148×11÷140 = 2745.51
となり、ホバリングフライト向けになります。
3Sバッテリーで14Tを使うと
ヘッドスピード = 11.1×3148×14÷140 = 3494.28
となり、通常フライト〜ハード3Dフライト向けになります。
※順番は前後しますが、結果を先に報告します。(当初、結論は最後にまとめるつもりでしたが、、)
結論:このモータ(ハイペリオン製のH2220)をOXY3でうまく使用することはできませんでした。
実際に搭載してフライトまでしたのですが、このモータをOXY3で使うのはあきらめました。
調査の過程や状況等は後ほど報告します。
候補2、アラインのブラシレスモータ430L(ESCとセットでT-REX450SEで使っていたものです)
当然、ESCとの組み合わせも問題なく使用できます。
もちろん、OXY3への搭載も問題なく、フライトも快適でした。
 3.サーボの選び方
3.サーボの選び方
使用できるサーボは機体により異なります。
搭載できるサーボの大きさを確認してサーボを購入しましょう。
OXY3の場合、サーボは250 〜450で使われるほとんどのサーボが搭載可能です。
フライトデザインで販売しているサーボではMKS社製のサーボ(推奨サーボ)のほか
ARKやSAVOX、アラインの250、450用のサーボ等がご利用できます。
(できれば、金属ギアを選んでください)
※OXY3の推奨では下記のスペックが要求されています。
サイクリックサーボ:スタンダードマイクロサイズサーボ 金属ギア スピード0.06秒/60° 6V
ラダーサーボ:スタンダードマイクロサイズサーボ 金属ギア スピード0.05秒/60° 6V (ラダー専用サーボ)
ARKやSAVOXのサーボでは求めらているスペックを満たしていませんが、
通常のフライトでは問題なくご利用できます。
スワッシュサーボ(サイクリックサーボ)
ARKのサーボ(SD109M)について
このサーボは発売から何年か経過している古いタイプのサーボになります。
(RCの部品では何年も仕様変更のないものも珍しくないです)
ですが、最新機種に搭載しても遜色ないスペックです。
トルク: 3.9kgと高トルクですのでしっかりとスワッシュプレートを固定します。
欠点は6V非対応ですので、4.8V動作でシステム構築する必要があります。
SAVOXのサーボは性能を考えるとコストパフォーマンスにすぐれています。
フライトデザインではSH-0255MGとSH-0257MGの2種類を販売しています。
SH-0255MGはトルク重視、SH-0257MGはスピード重視のサーボになります。
SAVOXデジタルサーボSH-0255MG(スワッシュ用)
SAVOXデジタルサーボSH-0257MG(スワッシュ用)
ラダーサーボ
SAVOXデジタルサーボSH-0262MG(テール用)
3-1-2今回搭載するサーボは?
今回はスワッシュプレート用にARKのサーボ(SD109M)、
ラダーサーボはSAVOXデジタルサーボSH-0262MG(テール用)を使います。
ARKのサーボ(SD109M)はX450からの流用、SAVOXデジタルサーボSH-0262MGは
このサイズのテール用サーボで探した結果、価格と性能から判断しました。
4.フライバーシステムの選び方
フライバーシステムは各メーカから色々と発売されています。
フライバーシステムはフライトに最も影響を与える頭脳といえる部品になります。
フライバーシステムによりセンサーの数や機能が変わりますので購入前に
事前に仕様を確認して下さい。
新しくフライバーシステムのご購入を検討されている方は6軸センサーで
パソコン等で設定が行えるものを選ぶと良いです。
(スマホから設定できるフライバーシステムもあります)
フライトデザインではMSH
Brain2シリーズとMICROBEAST PLUを販売しています。
MSH
Brain2がOXY3の推奨品になります。
製品により操作感も変わりますのでお好みに合わせてお選びください。
●MSH Brain2
※フライトデザインではMSH
Brain2シリーズには上写真のMSH Brain2 のほか
MSH Mini Brain2、 MSH Micro Brain2
を販売しています。
(どのタイプもOXY3に搭載可能ですが、お勧めは上記のMSH Brain2です。)
※MSH Micro Brain2を使用する場合サーボコネクタの変換が必要になります。
●MICROBEAST
PLUS
4-1今回搭載するフライバーシステムは?
今回はMSH
Micro Brainを搭載します。
これはMSH
Brain2シリーズの旧タイプのシリーズです。
ファームや設定アプリケーションは更新できますので、新しものが使えます。
パラメータの設定内容はBrainとBrain2、ほぼ同じです。
※標準サーボを使用するためサーボコネクタの変換基板を別途用意しまた。
5.組み立て開始

組み立てるのはOxy3
ヘリコプターキットのSport Editionです。
5-1 内容物の確認
OXY3の箱をあけると
写真のようにキャノピーが入っています。
(Sport Editionはタオル等のアクセサリは付属しません)
キャノピーの下にはパーツが入った箱とパレット(2個)があります。
BOX2
ランディングギア、メインギア、ブームクランプ、
バッテリートレイ、テールベルクランク、
追加ハードウェアバッグ、マニュアルCD、
シリアル番号カード
パレット1
カーボンファイバーのパーツが入ったパレット
(※注意:スポーツエディションのメインフレームはグラスファイバーです)
パレット2
CNC
コンポーネント、テールブーム、メイン及びテールブレード
5-2 各部品の組み立て
日本語マニュアルが付属していますので、マニュアルを確認しながら作成します。
特に工場出荷時に仮組の部品もありますので確認して下さい。
※注意:工場出荷時の状態が仕様変更等で変わる場合がございます。
仮組の部品は簡単にねじが外れます。
仮組の部品は必ずネジロック剤を塗布してください。
※ネジロック剤は中強度を使います。また、塗りすぎないようにしてください。
◇テールピッチスライダーの組み立て
この部品は工場で組み立て済みですので、
組み立て作業の必要はありません。
◇テールローターグリップセットの組み立て
1)パレット2からテールローターグリップセットを取り出します。
2)取り出したテールローターグリップセットは仮組の状態です。
3)テールローターグリップをハブから取り外します。
取り外しには六角レンチを2つ使います。
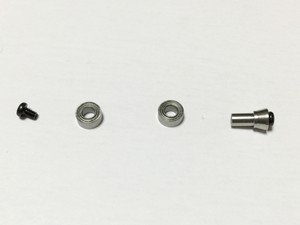
4)分解すると下写真の状態になります。
5)ジョイントボールの取り付けの際には、ネジロック剤を適量塗布します。
塗りすぎた場合はテッシュ等で拭き取ってください。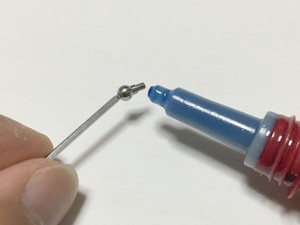
6)テールローターグリップの取り付けにはハブ側にネジロック剤を適量塗布します。
※ねじ側にはネジロック剤を塗布しません。
これは可動部分にネジロック剤が付着するのを避けるためです。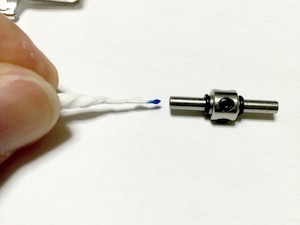
◇プリテンショナーベルトプーリーの組立て(Box02/Bag
2)

◇テールベルクランクの組立て
(Box 02/Bag 3)


ベルクランクのプラスチック素材(金属以外)には
ネジロック剤を塗布する必要はありません。
ジョイントボール&ピンはそのまま取り付けて下さい。


◇垂直翼は完成しています。
◇テールケースプレートは完成しています。
◇プリテンショナーベルトプーリーの組み込み
垂直翼にプリテンショナーベルトプーリーねじ込みます。
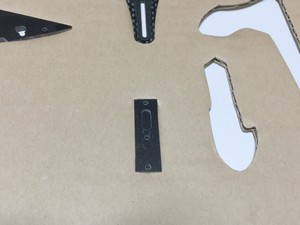
◇ベルクランプアームの組み込み
ベルクランプアームをテールケースプレートにを取り付けます。
ねじ止めにはネジロック剤を適量塗布します。
下写真のようにティシュを紙縒りにして
ネジロック剤を塗布するとつけすぎ防止になります。
部品によりねじ側でなく受け側に塗布するようにします。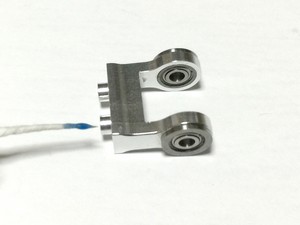
◇テールケースの組み込み


アセンブリ済みのテールシャフトドライブ
標準で15Tが付属しています。(オプションで16Tが選択可能)
※最新版(2018エディション)では 標準で16Tが付属、オプションで15Tが選択可能に仕様変更されています。
テールケースの組み込みの際にはタイミングベルトを通しておきます。





◇テールの組み立て





ベルクランクを取り付けます。
◇カーボンファイバーテールプッシュロッドの組み立て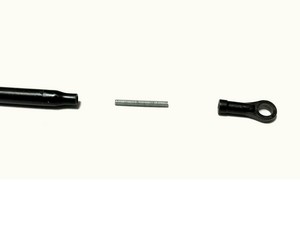

プッシュロッドとネジロッドは組み立て済みです。
リンケージロッドとリンケージボールを取り付けます。
ネジロッドとリンケージボール隙間は3mmにします。
◇テールサーボマウントの組み立て

◇カーボンフレームの組み立て
キャノピーマウント(キャノピー分離部)組み立て



ブームクランプの組み立て


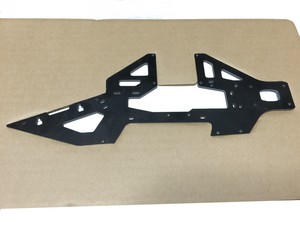

メインフレームの組み立て
各パーツをサイドフレームに固定していきます。
最初は仮組みですのでネジロック剤は塗布しません。
ネジロック剤はフレーム全体を組み立て微調整が終わった後に塗布します。
左上)アッパーベアリングブロック、右上)ミドルベアリングブロック
左下)ロウアーベアリングブロック、右下)モータマウント
1)ベアリングブロックの固定
メインフレームに3つのベアリングブロックを固定します。
上からアッパーベアリングブロック、ミドルベアリングブロック、
ロウアーベアリングブロックの順番に固定してください。
2)キャノピーマウントの固定
3)バッテリートレイの固定
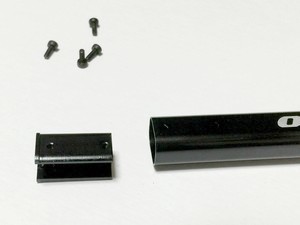
4)テールブームクランプの固定

テールブームクランプに仮組されているスティフナーを外します。
フレームに位置決めし上写真のように再び固定します。
5)モータマウントを固定

これで左サイドの部品取り付けが終わりました。
6)右サイドのサイドフレームを固定
残り、右サイドを固定すればフレームの仮組は終わりです。
7)微調整
フレームの仮組が終わったら歪みがないか調整します。
メインシャフトを取り出しベアリングブロックに通します。
シャフトがスムーズに上下するように歪みを調整しながら各ベアリングブロックを
しっかりと固定してください。
歪みなく組みあがるとメインシャフトがストンと落ちるように入ります。
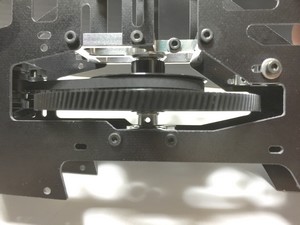
メインギアの組み込み

メインギアを組み込む際、予めメインフレームにテールブームを差し込んでおきます。
テールベルトをメインギアの上部にあるテールベルト用のドライブギアに掛けます。
その際、ベルトの向きに注意してください。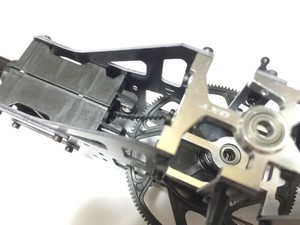




ローターヘッドの組み立て





スワッシュプレートの組み立て

各リンケージボールは仮止めの状態ですので、
ネジロック剤を塗布して固定しなします。

6.フライバーシステムの設定とテストフライト
フライバーシステムの設定は各フライバーシステムの説明に沿って行ってください。
6-1
MSH Brain2 フライバーレスユニットの設定
MSH Brain/Brain2のシリーズは
標準サイズのBrain2に加えMicro、Miniとサイズ異なるものも用意されています。
コネクタやサイズ等、多少違いはありますが、設定項目はほぼ同じです。
ソフトウエアは詳細設定が可能なモードと、ウイザードモード(順番に設定して行く簡単モード)
が用意されています。一部、詳細設定が必要な部分もありますが、
大半はウイザードモードで設定可能です。
※ファームウエアを更新した場合は、一度、工場出荷状態に初期化してから再度設定しなおしてください。
最新のファームウエアに更新した場合は自動的に工場出荷状態に初期化されるようです。
6-2 テストフライト

6-2-1 テストフライト1回目
メカの組み込みと大体の調整が終了したので軽くフライトさせました。
ホバリングや旋回、フライトには問題ありません。
初めてのフライトですので、念入りに確認します。
ねじ類にゆるみはなく、問題なさそうです。
しかし、モータに手を触れると異常に発熱してることに気が付きました。
熱くて触れません。
この状態でフライトさせるのは大変危険です。
後日、温度上昇の対策のために詳しく調べることしました。
フライト直後にモータの温度を測ると50°を軽く超えています。
表面温度がこれだと内部温度はさらに高いことが予想されます。
こもった熱をうまく逃がす必要があります。
データをさらに詳しく測定することにしました。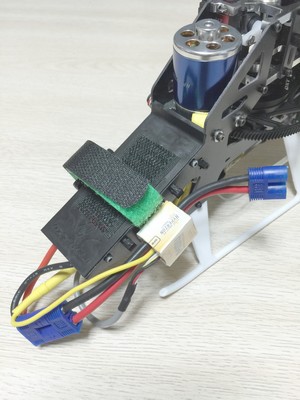
計測にはハイペリオンのデータロガーを使用することにしました。
このデータロガーに温度センサを取り付け、
温度の記録と電圧の状態を計測します。
データロガーは電源投入すると自動的にサンプリング開始します。
後にE-meterで記録したデータを読み込みます。
※温度センサはモーターマウント部分に取り付けています。
E-meterでデータを取り込み、パソコンで確認します。
※アプリケーションが最新OSに対応していないようでしたので
Windows
XPを使いました。(計測時点).jpg)
黒色が電圧の変化、黄色が温度変化を表しています。
グラフの見方は横軸が時間、左軸は電圧、右軸は温度です。
※各軸のスケールは計測データにより異なります。
(上記のグラフの温度の最大は90°です。)
時間を追って見てみると電圧が11V付近を底になり、その後、上がり出しています。
これはホバリングを終了し機体を下したところです。
電圧の動作は負荷がなくなったためこのような動きをします。
温度の上昇がこの後も続くのはモータ内部に蓄積された熱が表面に伝わてきている為と思われます。
フライト後の急激な温度上昇はホバリン中にある程度、風の流れで抑えられていた熱が、
風の流れがなくなることで冷却効果がなくなり一気に温度上昇していると思われます。
温度は65°〜80°まで上昇。
対策として温度上昇の問題を改善するためファンを取り付け強制冷却してみます。.jpg)
黒色が電圧の変化、黄色が温度変化を表しています。
グラフの見方は横軸が時間、左軸は電圧、右軸は温度です。
※各軸のスケールは計測データにより異なります。
(上記のグラフの温度の最大は70°です。)
ファンによる強制冷却で温度の上昇はある程度押されることができました。
ですが、安心してフライトできる範囲には程遠いものでした。
フライト後に温度は60°〜70°まで上昇しています。
ファンによる強制冷却だけで蓄積した熱をうまく逃がすことができていないようです。
モータの制御に原因があるのかは不明ですが、現在使用しているESCでは
詳細な設定ができませんので今回はこの組み合わせはあきらめることにしました。
すこし寄り道をしましたが、結局アラインのブラシレスモータ430L
(ESCとセットでT-REX450SEで使っていたものです)を搭載してテストフライトを行いました。
当然、ESCとの組み合わせに問題はなくOXY3でのフライトも快適でした。